Antriebstechnik
Be- und Entladung
Automatische Steuerung
Zugsicherungssysteme
Fahrwerk



Das einzig wirklich Neue ist die Einführung zusätzlicher Spurführungsmöglichkeiten,
die der Bahn neue Betriebsarten erschließen. Alles andere existiert
bereits in irgendeiner Form und muß nur zusammengeschraubt werden.

Antriebstechnik
Bahndroschken sollen komplett elektrisch angetrieben werden. Das heißt, jede Bahndroschke braucht also Stromabnehmer und elektrische Ausrüstung für alle Stromsysteme, unter denen sie verkehren soll. Wie moderne Lokomotiven und Stadtbahnen zeigen, ist dies heutzutage kein Problem mehr. Selbst Ausführungen, die auch mit berliner oder hamburger Stromschiene fahren können, sind denkbar. Dazu beachte man die Ausführungen zum Karlsruher Modell von Martin Karr.
Um auch nicht elektrifizierte Gleise befahren zu können, sollten Bahndroschken einen Speicher (Schwungrad, Batterie, Kondensator) erhalten, der unter Fahrdraht wieder aufgeladen wird. Die Aufladung könnte auch auf extra dafür mit Stromschiene ausgerüsteten Abstellgleisen durchgeführt werden.
Für längere nicht elektrifizierte Nebenbahnen wären auch Fahrzeuge mit einem kleinen Verbrennungsgenerator oder einer Brennstoffzelle denkbar.
Für problemlose Bergfahrten muß jeder Radsatz durch einen Drehstromasynchronmotor angetrieben werden. Dadurch würden Bahndroschken Steigungen bis 10 Prozent bei jedem Wetter überwinden können. Die maximale Antriebsleistung pro Achse sollte bei etwa 100 kW liegen.
Für Strecken, auf denen man normalerweise eine Zahnradbahn errichten würde, sollte ein Linearmotor installiert werden. Passivweichen können in solchen Abschnitten nicht angeordnet werden, da die Leitrollen bei Linearmotorbetrieb in Mittelstellung verbleiben müssen. Information über Linearmotoren im Bahneinsatz kann man auf den Seiten der Neuen Bahntechnik Paderborn nachlesen.
Bahndroschken sollen komplett elektrisch angetrieben werden. Das heißt, jede Bahndroschke braucht also Stromabnehmer und elektrische Ausrüstung für alle Stromsysteme, unter denen sie verkehren soll. Wie moderne Lokomotiven und Stadtbahnen zeigen, ist dies heutzutage kein Problem mehr. Selbst Ausführungen, die auch mit berliner oder hamburger Stromschiene fahren können, sind denkbar. Dazu beachte man die Ausführungen zum Karlsruher Modell von Martin Karr.
Um auch nicht elektrifizierte Gleise befahren zu können, sollten Bahndroschken einen Speicher (Schwungrad, Batterie, Kondensator) erhalten, der unter Fahrdraht wieder aufgeladen wird. Die Aufladung könnte auch auf extra dafür mit Stromschiene ausgerüsteten Abstellgleisen durchgeführt werden.
Für längere nicht elektrifizierte Nebenbahnen wären auch Fahrzeuge mit einem kleinen Verbrennungsgenerator oder einer Brennstoffzelle denkbar.
Für problemlose Bergfahrten muß jeder Radsatz durch einen Drehstromasynchronmotor angetrieben werden. Dadurch würden Bahndroschken Steigungen bis 10 Prozent bei jedem Wetter überwinden können. Die maximale Antriebsleistung pro Achse sollte bei etwa 100 kW liegen.
Für Strecken, auf denen man normalerweise eine Zahnradbahn errichten würde, sollte ein Linearmotor installiert werden. Passivweichen können in solchen Abschnitten nicht angeordnet werden, da die Leitrollen bei Linearmotorbetrieb in Mittelstellung verbleiben müssen. Information über Linearmotoren im Bahneinsatz kann man auf den Seiten der Neuen Bahntechnik Paderborn nachlesen.
Be- und Entladung
Bahndroschken sollen in der Normalausführung ausschließlich mit Containern und Personenkabinen beladen werden, und zwar von der Seite und, wenn nötig, auch von oben. Jede Bahndroschke braucht daher eine Mobiler-Ausrüstung.
Als Fracht kommen 3-Meter-Personengondeln sowie 6-, 9- und 12-Meter-Container mit Breiten von 2,5m bis 3,0m in Frage.
Bahndroschken, die Passagiercontainer transportieren, sollen so gebaut sein, daß 55-Zentimeter-Bahnsteige ideal bedient werden, aber auch höhere Bahnsteige sollen erreicht werden. Ein ausschiebbares Trittbrett und eine Niveauregulierung sollen an Mittelflur- und Hochflurbahnsteigen jedem einen problemlosen Ein- und Ausstieg ermöglichen. Da die Bahndroschke keine Seitenwände und nach Möglichkeit auch kein Dach bekommen soll, ist ein stabiles Untergestell nötig, die Räder sollten der Laufgüte wegen mindestens 75cm im Durchmesser messen und die neuen Leiteinrichtungen nehmen auch ihren Platz weg. Für Niederflurbahnsteige ist diese Fahrzeugklasse daher nur bedingt geeignet. Eine Stufe wäre dort in Kauf zu nehmen. Diese läßt sich minimieren, indem man den Fahrzeugrahmen bei Halten an Niederflurbahnsteigen per Niveauregulierung auf die Schienen absetzt.
Mit dem Mobiler wird es möglich, Container aus eigener Kraft auf eine Laderampe oder einen bereitstehenden Lastwagen zu verschieben.
Eine Beladung der Bahndroschke über die Stirnseiten ist nicht vorgesehen, ich sehe einfach keinen Bedarf dafür.
Bahndroschken sollen in der Normalausführung ausschließlich mit Containern und Personenkabinen beladen werden, und zwar von der Seite und, wenn nötig, auch von oben. Jede Bahndroschke braucht daher eine Mobiler-Ausrüstung.
Als Fracht kommen 3-Meter-Personengondeln sowie 6-, 9- und 12-Meter-Container mit Breiten von 2,5m bis 3,0m in Frage.
Bahndroschke mit Seecontainer:
Bahndroschke mit zwei Personengondeln:
Bahndroschke mit zwei Personengondeln:
Bahndroschken, die Passagiercontainer transportieren, sollen so gebaut sein, daß 55-Zentimeter-Bahnsteige ideal bedient werden, aber auch höhere Bahnsteige sollen erreicht werden. Ein ausschiebbares Trittbrett und eine Niveauregulierung sollen an Mittelflur- und Hochflurbahnsteigen jedem einen problemlosen Ein- und Ausstieg ermöglichen. Da die Bahndroschke keine Seitenwände und nach Möglichkeit auch kein Dach bekommen soll, ist ein stabiles Untergestell nötig, die Räder sollten der Laufgüte wegen mindestens 75cm im Durchmesser messen und die neuen Leiteinrichtungen nehmen auch ihren Platz weg. Für Niederflurbahnsteige ist diese Fahrzeugklasse daher nur bedingt geeignet. Eine Stufe wäre dort in Kauf zu nehmen. Diese läßt sich minimieren, indem man den Fahrzeugrahmen bei Halten an Niederflurbahnsteigen per Niveauregulierung auf die Schienen absetzt.
Mit dem Mobiler wird es möglich, Container aus eigener Kraft auf eine Laderampe oder einen bereitstehenden Lastwagen zu verschieben.
Eine Beladung der Bahndroschke über die Stirnseiten ist nicht vorgesehen, ich sehe einfach keinen Bedarf dafür.
Automatische Steuerung
Auch automatische Frachtsysteme sind bereits einsatzreif, wie der CargoMover von Siemens zeigt. Überhaupt wäre der CargoMover mit elektrischem Antrieb und Leitrollen bereits eine vollwertige Bahndroschke.
Unabhängig davon, wie die Steuerung des CargoMovers arbeitet, wird die Bahndroschke folgende Eigenschaften haben oder Anforderungen erfüllen (müssen):
- Verkabelung mittel CAN-Bus (ISO-Bus), Protokoll CAN open safety
- Zwei- oder Dreikanaligkeit zur Erreichung des Security Integration Levels 3, besser SIL 4
- Programmierung der sicherheitsrelevanten Bordsoftware in ANSI C nach den MISRA-Regeln
Als Jobrechner würden beispielsweise, um mal Namen zu nennen, Geräte vom Typ Palfinger Paltronic 80 (jeweils anderthalbkanalig) in Kombination mit Bediengeräten vom Typ WTK Fieldoperator 300 sämtliche Anforderungen erfüllen.
Weiterhin wird die Bahndroschke diverse Kameras und ein Bilderkennungssystem benötigen. Solch ein System ist bereits einsatzreif oder kurz vor der Einsatzreife und wurde an der S-Bahn Dresden bereits erprobt. Die Zuverlässigkeit und Verfügbarkeit derartiger Bilderkennungssysteme liegt heutzutage bereits über der von menschlichen Lokführern. Die Steuerung eines spurgeführten Fahrzeuges per Rechner ist außerdem wesentlich unkomplizierter als die Steuerung eines Straßenfahrzeuges, zumal sich bei der Bahn auf relativ einfache Weise eine wesentlich effektivere Kommunikations- und Sicherungstechnik als bei der Straße installieren läßt.
Auch automatische Frachtsysteme sind bereits einsatzreif, wie der CargoMover von Siemens zeigt. Überhaupt wäre der CargoMover mit elektrischem Antrieb und Leitrollen bereits eine vollwertige Bahndroschke.
Unabhängig davon, wie die Steuerung des CargoMovers arbeitet, wird die Bahndroschke folgende Eigenschaften haben oder Anforderungen erfüllen (müssen):
- Verkabelung mittel CAN-Bus (ISO-Bus), Protokoll CAN open safety
- Zwei- oder Dreikanaligkeit zur Erreichung des Security Integration Levels 3, besser SIL 4
- Programmierung der sicherheitsrelevanten Bordsoftware in ANSI C nach den MISRA-Regeln
Als Jobrechner würden beispielsweise, um mal Namen zu nennen, Geräte vom Typ Palfinger Paltronic 80 (jeweils anderthalbkanalig) in Kombination mit Bediengeräten vom Typ WTK Fieldoperator 300 sämtliche Anforderungen erfüllen.
Weiterhin wird die Bahndroschke diverse Kameras und ein Bilderkennungssystem benötigen. Solch ein System ist bereits einsatzreif oder kurz vor der Einsatzreife und wurde an der S-Bahn Dresden bereits erprobt. Die Zuverlässigkeit und Verfügbarkeit derartiger Bilderkennungssysteme liegt heutzutage bereits über der von menschlichen Lokführern. Die Steuerung eines spurgeführten Fahrzeuges per Rechner ist außerdem wesentlich unkomplizierter als die Steuerung eines Straßenfahrzeuges, zumal sich bei der Bahn auf relativ einfache Weise eine wesentlich effektivere Kommunikations- und Sicherungstechnik als bei der Straße installieren läßt.
Zugsicherungssysteme
Für die Navigation von Bahndroschken kommt eigentlich nur ein System in Frage: das European Train Control System ETCS. Auch dieses System ist einsatzreif, Information dazu findet sich auf den Seiten der Schweizer Bundesbahn.
Natürlich muß man für die Bahndroschke zusätzliche Signalbegriffe und Betriebsarten einführen, was aber vermutlich softwareseitig lösbar ist.
Für die Navigation von Bahndroschken kommt eigentlich nur ein System in Frage: das European Train Control System ETCS. Auch dieses System ist einsatzreif, Information dazu findet sich auf den Seiten der Schweizer Bundesbahn.
Natürlich muß man für die Bahndroschke zusätzliche Signalbegriffe und Betriebsarten einführen, was aber vermutlich softwareseitig lösbar ist.
Fahrwerk
Der CargoMover von Siemens ist ein Beispiel dafür, wie ein Bahndroschke-Fahrwerk aussehen kann. Auch mehrteilige Garnituren sind denkbar. Allerdings ist der CargoMover doch schon ein ziemlich großes Gerät, welches in keine BoStrab-Fahrzeugumgrenzung paßt, um keine enge Stadtbahnkurve kommt und erst mit drei Containern ausgelastet ist.
Der kleinste befahrbare Kurvenradius sollte bei 50m liegen, die Höchstgeschwindigkeit bei 160km/h.
Daher sollte man erwägen, unterhalb dieser Klasse weitere Fahrzeugtypen zu entwickeln, vorzugsweise mit dreiachsigen Gelenkfahrwerken der Achsfolge Co. Damit ließen sich Container von 3m, 6m und 9m Länge und 2,5m bzw. 2,6m Breite auch durch Städte über Trambahngleise bugsieren. Der Achsstand sollte zwischen 7m und 10m betragen, das Eigengewicht zwischen 10t und 15t.
Der kleinste befahrbare Kurvenradius sollte bei 25m liegen, die Höchstgeschwindigkeit bei 160km/h.
Unterhalb dieser Klasse wäre noch ein Fahrzeug der Achsfolge A1A denkbar, dessen mittlerer Radsatz kleine Einzellaufräder besitzt. Dieses Fahrzeug würde den Kleinbus unter den Bahndroschken darstellen, denn auf ihm ließe sich nur ein 3m-Container oder eine Personengondel unterbringen. Ein Achsstand von 4m scheint hierfür angemessen.
Der kleinste befahrbare Kurvenradius sollte bei 10m liegen, die Höchstgeschwindigkeit bei 130km/h.
Alle Bahndroschken sollten ihre Radsätze in Bögen radial einstellen. Um auf aktive Steuerungen verzichten zu können, sollte die Stellung der Radsätze bei Drehgestellfahrzeugen von der Drehung der Drehgestelle abgeleitet werden, bei dreiachsigen Bahndroschken von der seitlichen Verschiebung der Achsen.
Der CargoMover von Siemens ist ein Beispiel dafür, wie ein Bahndroschke-Fahrwerk aussehen kann. Auch mehrteilige Garnituren sind denkbar. Allerdings ist der CargoMover doch schon ein ziemlich großes Gerät, welches in keine BoStrab-Fahrzeugumgrenzung paßt, um keine enge Stadtbahnkurve kommt und erst mit drei Containern ausgelastet ist.
Der kleinste befahrbare Kurvenradius sollte bei 50m liegen, die Höchstgeschwindigkeit bei 160km/h.
Daher sollte man erwägen, unterhalb dieser Klasse weitere Fahrzeugtypen zu entwickeln, vorzugsweise mit dreiachsigen Gelenkfahrwerken der Achsfolge Co. Damit ließen sich Container von 3m, 6m und 9m Länge und 2,5m bzw. 2,6m Breite auch durch Städte über Trambahngleise bugsieren. Der Achsstand sollte zwischen 7m und 10m betragen, das Eigengewicht zwischen 10t und 15t.
Der kleinste befahrbare Kurvenradius sollte bei 25m liegen, die Höchstgeschwindigkeit bei 160km/h.
Unterhalb dieser Klasse wäre noch ein Fahrzeug der Achsfolge A1A denkbar, dessen mittlerer Radsatz kleine Einzellaufräder besitzt. Dieses Fahrzeug würde den Kleinbus unter den Bahndroschken darstellen, denn auf ihm ließe sich nur ein 3m-Container oder eine Personengondel unterbringen. Ein Achsstand von 4m scheint hierfür angemessen.
Der kleinste befahrbare Kurvenradius sollte bei 10m liegen, die Höchstgeschwindigkeit bei 130km/h.
Alle Bahndroschken sollten ihre Radsätze in Bögen radial einstellen. Um auf aktive Steuerungen verzichten zu können, sollte die Stellung der Radsätze bei Drehgestellfahrzeugen von der Drehung der Drehgestelle abgeleitet werden, bei dreiachsigen Bahndroschken von der seitlichen Verschiebung der Achsen.
mechanische Achslenkung an einem Drehgestellfahrzeug, Prinzipskizze:
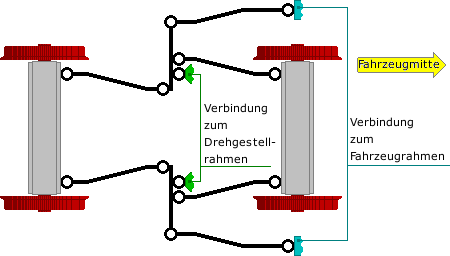
Die Achslenkerkulisse muß selbstverständlich nicht zwingend waagerecht angeordnet sein, normalerweise bringt man derartiges Hebelwerk senkrecht an.
Die Achslenkerkulisse muß selbstverständlich nicht zwingend waagerecht angeordnet sein, normalerweise bringt man derartiges Hebelwerk senkrecht an.
